 Flymaple is a controller board, based on the Maple Project.
Flymaple is a controller board, based on the Maple Project.
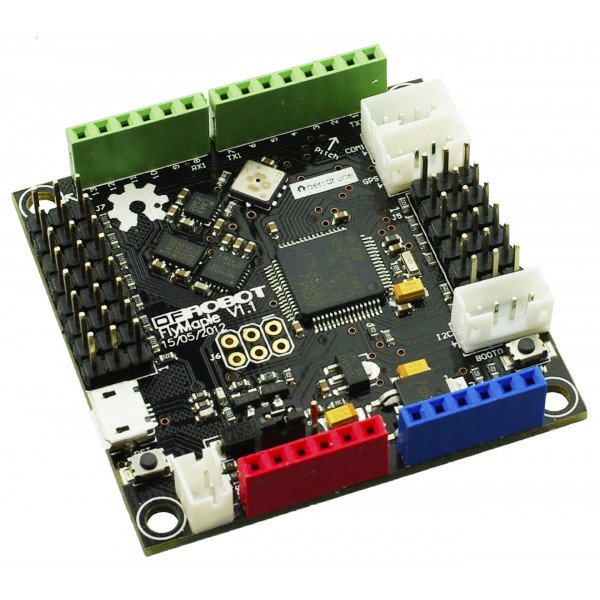
The FlyMaple embeds a M32F103RET6 (ARM Cortex-M3) as it’s main MCU. It integrates a 3-Axis accelerometer,a 3-Axis gyroscope,a 3-Axis compass and a barometric pressure sensor. By using the 10 dgrees of freedom IMUs and powerful 72MHz high-performation microcontroller, flymaple is powerful enough to handle a complex algorithm and manage a robot motion system at the same time.

The pinout shows that we can use 8 radio channels inputs (J7) and we can provide up to 8 pwm signal (J5/J3). The board admits from 7V to 12V through the connector J9.
Specification
- Working Voltage: 5v
- STM32 Operating Voltage: 3.3v
- 7~12v External Power supply from the 2p JST connector
- Output Voltage: 3.3v/5v or External input power
- Microcontroller: STM32F103
- Running at 72Mhz with 32bit Arduino sytle ARM processor(Cortex-M3)
- Bootloader: Leaflabs Maple RET6 Edition
- 10 Degrees of Freedom on a single, flat board:
- ITG-3200 – triple-axis digital-output gyroscope
- ADXL345 – 13-bit resolution, ±16g, triple-axis accelerometer
- HMC5883L – triple-axis, digital magnetometer
- BMP085 – high-precision barometric pressure sensor
- Programable through an Arduino-based development environment – Maple IDE
- Compatible with most of Arduino shields
- Extends 6 channels PWM pins for controlling ESC/Servo
- Extends 8 channels GPIO for capturing RC receiver output
- 3x 4p JST connectors:
- Serial port 1
- GPS extension port
- I2C interface
- Size: 50x50x12mm
- Weight: 15g
- Envionment Friendly: Rohs Compliance
Sources: